Industrieller Roboter-Endeffektor/Dexteröse Roboterhand
Geschickte Roboterhand
 Hochpräziser Teleoperations-Mechanik-Exoskelett-HandschuhDer mechanische Exoskelett-Handschuh Honpine EG ist ein Exoskelett-Handschuh-Produkt, das für hochpräzise Handbewegungserfassung und unterstützende Steuerung entwickelt wurde. Ausgestattet mit der zentralen Magnetencoder-Technologie bietet der Handschuh nicht nur eine hohe Präzision bei der Erkennung von Handgelenkwinkeln, sondern eliminiert auch Positionsdrift. Darüber hinaus ermöglicht er durch die Integration der ESP-NOW-Funkübertragungstechnologie mit einem dynamischen Mapping-Kalibrierungsalgorithmus eine hochpräzise Teleoperation von geschickten Händen. Derzeit ist das Produkt in der industriellen Fertigung, medizinischen Rehabilitation, wissenschaftlichen Forschung und anderen Bereichen breit einsetzbar und erfüllt die praktischen Anwendungsanforderungen verschiedener Szenarien.Details
Hochpräziser Teleoperations-Mechanik-Exoskelett-HandschuhDer mechanische Exoskelett-Handschuh Honpine EG ist ein Exoskelett-Handschuh-Produkt, das für hochpräzise Handbewegungserfassung und unterstützende Steuerung entwickelt wurde. Ausgestattet mit der zentralen Magnetencoder-Technologie bietet der Handschuh nicht nur eine hohe Präzision bei der Erkennung von Handgelenkwinkeln, sondern eliminiert auch Positionsdrift. Darüber hinaus ermöglicht er durch die Integration der ESP-NOW-Funkübertragungstechnologie mit einem dynamischen Mapping-Kalibrierungsalgorithmus eine hochpräzise Teleoperation von geschickten Händen. Derzeit ist das Produkt in der industriellen Fertigung, medizinischen Rehabilitation, wissenschaftlichen Forschung und anderen Bereichen breit einsetzbar und erfüllt die praktischen Anwendungsanforderungen verschiedener Szenarien.Details Intelligenter Teleoperationshandschuh für Robotik für VR AR FernoperationenDer HONPINE Teleoperationshandschuh ist ein hochpräzises Gerät zur Erfassung von Handbewegungen, das für intelligente Robotik und Fernsteuerungsanwendungen entwickelt wurde. Basierend auf fortschrittlicher Motion-Capture-Technologie und dem unternehmenseigenen dynamischen Mapping-Algorithmus ermöglicht der Handschuh eine präzise Steuerung geschickter Roboterhände. Durch die Erfassung und Übertragung von Handbewegungen in Echtzeit können Benutzer Roboterhände natürlich und intuitiv bedienen und damit die Anforderungen verschiedener Anwendungsszenarien wie Fernoperationen, virtuelle Realität (VR), erweiterte Realität (AR) und intelligente Fertigung erfüllen.Details
Intelligenter Teleoperationshandschuh für Robotik für VR AR FernoperationenDer HONPINE Teleoperationshandschuh ist ein hochpräzises Gerät zur Erfassung von Handbewegungen, das für intelligente Robotik und Fernsteuerungsanwendungen entwickelt wurde. Basierend auf fortschrittlicher Motion-Capture-Technologie und dem unternehmenseigenen dynamischen Mapping-Algorithmus ermöglicht der Handschuh eine präzise Steuerung geschickter Roboterhände. Durch die Erfassung und Übertragung von Handbewegungen in Echtzeit können Benutzer Roboterhände natürlich und intuitiv bedienen und damit die Anforderungen verschiedener Anwendungsszenarien wie Fernoperationen, virtuelle Realität (VR), erweiterte Realität (AR) und intelligente Fertigung erfüllen.Details- Hochpräzise Steuerung 21-DoF industrielle dexterische menschliche HandHONPINE L30 ist eine dexterische Hand mit 21-DoF, die feine menschliche Handbewegungen mit einer Betriebspräzision im Millimeterbereich präzise nachbildet. Sie nutzt einen fortschrittlichen Sehnenantrieb und hochintegrierte mechatronische Systeme für stabile Bewegungen und präzise Steuerung und unterstützt multimodale Wahrnehmung (Kraft, Berührung, Sicht), um die Echtzeitwahrnehmung und Interaktionszuverlässigkeit zu verbessern. Mit hohen DoFs, multimodaler Wahrnehmung und führenden Bewegungssteuerungsalgorithmen wird sie широко in der industriellen Automatisierung, der medizinischen Assistenz und in Forschungsexperimenten eingesetzt—und bietet eine hochgradig anpassungsfähige, zuverlässige Endeffektorlösung.Details
- Hochpräzise 21-DoF-Dexterous-Hand für natürliches Greifen wie mit der menschlichen HandHONPINE L20 ist eine 21-DoF-Dexterous-Hand, die das natürliche Greifen der menschlichen Hand mit feinfühligen Operationen präzise simuliert. Sie verwendet einen innovativen Gestängeantrieb und selbst entwickelte Motoren für hochpräzise Bewegungen und unterstützt Kraft-, Sicht- und Tastsensoren—zur Verbesserung der Umweltanpassungsfähigkeit und der intelligenten Interaktion durch multimodale Wahrnehmung. Mit hohen Freiheitsgraden, multimodaler Wahrnehmung und Kraft-Positions-Hybridalgorithmen wird sie häufig in Bildung & Forschung, industrieller Automatisierung, Haushaltshilfe und Altenpflege eingesetzt—und bietet präzise, geschickte Betriebslösungen.Details
- Hochleistungs-Roboterhand mit präziser Steuerung, humanoide bionische geschickte HandHONPINE Robot Hand L10 ist eine hochleistungsfähige geschickte Hand mit 20 DoFs. Ausgestattet mit selbst entwickelten Motoren und Gestänge-Übertragungsmechanismen gewährleistet sie eine stabile Traktion und ermöglicht gleichzeitig präzise Steuerung und flüssige Bewegungen. Sie wird широко in Bildung & Forschung, Klavierspiel, Haushaltshilfe und Altenpflege eingesetzt und fördert die Weiterentwicklung und Umsetzung intelligenter Roboter sowie der Mensch-Roboter-Kollaboration. Sie unterstützt multimodale
Umgebungswahrnehmung über verschiedene Sensoren und ist mit ROS/QT-Umgebungen kompatibel (mit standardmäßigen ROS-Plugins für die Sekundärentwicklung).Details  Hochleistungs-17-DoF-Mehrfingerhand für RobotersystemeDie HONPINE 07 Roboterhand ist eine hochleistungsfähige Mehrfingerhand mit 17 DoFs. Angetrieben von selbst entwickelten Motoren vereint sie Kostenkontrolle mit zuverlässiger Greif- und Betriebsleistung und erfüllt vielfältige Anwendungsanforderungen. Sie bietet ROS-Plugins für die Sekundärentwicklung und eignet sich für Bildung & Forschung, unterstützendes Greifen und intelligente Interaktion—und bietet eine effiziente, wirtschaftliche Mehrfingerhand-Lösung für Robotersysteme.Details
Hochleistungs-17-DoF-Mehrfingerhand für RobotersystemeDie HONPINE 07 Roboterhand ist eine hochleistungsfähige Mehrfingerhand mit 17 DoFs. Angetrieben von selbst entwickelten Motoren vereint sie Kostenkontrolle mit zuverlässiger Greif- und Betriebsleistung und erfüllt vielfältige Anwendungsanforderungen. Sie bietet ROS-Plugins für die Sekundärentwicklung und eignet sich für Bildung & Forschung, unterstützendes Greifen und intelligente Interaktion—und bietet eine effiziente, wirtschaftliche Mehrfingerhand-Lösung für Robotersysteme.Details- Hochpräzise kompakte bionische geschickte Hand mit hoher GreifkraftDie bionische geschickte Hand HONPINE O6 verfügt über 6 aktive Gelenke und 5 passive Gelenke. Sie bietet hohe Greifkraft, präzise Kraftsteuerung, kompakte Abmessungen und ein leichtes Design. Sie eignet sich besonders für Anwendungen wie Logistikhandling, industrielle Montage und das Greifen unregelmäßig geformter Objekte.Details
- Humanoide Roboter-Dexterhand mit FingergelenkdesignDie Roboter-Dexterhand ist ein Roboter-Endeffektor, der die menschliche Hand in hohem Maße nachahmt. Sie verwendet ein anthropomorphes Fünf-Finger-Strukturdesign und simuliert die Gelenkbewegung der menschlichen Hand durch mehr als 15 Freiheitsgrade, um feine Operationen wie Greifen und Kneifen zu ermöglichen. Sie ist die Kernkomponente des Roboters für die Ausführung komplexer Aufgaben. Sie gehört zum Greifertyp unter den Roboter-Endeffektoren. Im Unterschied zum herkömmlichen Zwei-Finger-Greifer verfügt sie über multimodale Wahrnehmungs- und intelligente Steuerungsfähigkeiten, kann sich an unregelmäßige Objekte anpassen und Präzisionsaufgaben ausführen.Details








Elektrischer Greifer
 HONPINE WEPG Serie elektrische Wiegegreifer für die LebensmittelindustrieDie elektrischen Wiegegreifer der HONPINE WEPG-Serie umfassen derzeit die Modelle WEPG01, WEPG05, WEPG-T08 und WEPG-T15 und decken maximale Nutzlasten von jeweils 1 kg, 5 kg, 8 kg und 15 kg ab. Diese Produktreihe erfüllt vollständig die Gewichtsanforderungen in der Lithiumbatterieproduktion und deckt die meisten industriellen Wiegeanwendungen ab.
HONPINE WEPG Serie elektrische Wiegegreifer für die LebensmittelindustrieDie elektrischen Wiegegreifer der HONPINE WEPG-Serie umfassen derzeit die Modelle WEPG01, WEPG05, WEPG-T08 und WEPG-T15 und decken maximale Nutzlasten von jeweils 1 kg, 5 kg, 8 kg und 15 kg ab. Diese Produktreihe erfüllt vollständig die Gewichtsanforderungen in der Lithiumbatterieproduktion und deckt die meisten industriellen Wiegeanwendungen ab.
Neben der breiten Anwendung in Fertigungslinien für Lithiumbatterien wurde die WEPG-Serie auch erfolgreich in der Automobil-, Pharma- und Lebensmittelverarbeitungsindustrie eingesetzt, mit Referenzkunden in mehreren Branchen. Die Serie unterstützt zudem kundenspezifische Lösungen für Wiegeanwendungen in verschiedenen Szenarien.Details Elektrische Parallelgreifer der HONPINE EPG-FLEX Serie für die PräzisionsfertigungMit dem Aufkommen flexibler Fertigung in Kleinserien und mit großer Variantenvielfalt ist die schnelle Rekonfiguration von Automatisierungsanlagen unverzichtbar geworden. Herkömmliche elektrische Greifer mit festem Design haben häufig Schwierigkeiten, häufige Änderungen in Produktionsprozessen und Anwendungsszenarien zu erfüllen.
Elektrische Parallelgreifer der HONPINE EPG-FLEX Serie für die PräzisionsfertigungMit dem Aufkommen flexibler Fertigung in Kleinserien und mit großer Variantenvielfalt ist die schnelle Rekonfiguration von Automatisierungsanlagen unverzichtbar geworden. Herkömmliche elektrische Greifer mit festem Design haben häufig Schwierigkeiten, häufige Änderungen in Produktionsprozessen und Anwendungsszenarien zu erfüllen.
Die elektrischen Parallelgreifer der HONPINE EPG-FLEX Series wurden entwickelt, um diesen Bedarf zu erfüllen, basierend auf einem Konzept modularer Standardisierung und flexibler Konfiguration. Als fortschrittliches Upgrade im Portfolio elektrischer Greifer von HONPINE bietet die EPG-FLEX Series eine anpassungsfähigere Lösung für komplexe industrielle Automatisierungsumgebungen.
Die Serie hat starke Leistung in Anwendungen wie der Montage verschiedener Komponententypen in der 3C-Elektronikindustrie, dem Umschalten zwischen mehreren Stationen in Produktionslinien für neue Energien und der unterstützenden Materialhandhabung in der Halbleiterfertigung gezeigt.Details Elektrischer Parallelgreifer für die industrielle Automatisierung ersetzt pneumatische Greifer problemlosDie elektrischen Parallelgreifer der HONPINE EPG-ST Serie sind als kosteneffizienter Ersatz für herkömmliche pneumatische Greifer in Pick-and-Place- und Materialhandhabungsanwendungen konzipiert. Mit integriertem Motor, Treiber und Steuerung ermöglichen sie den direkten Ersatz pneumatischer Greifer derselben Größe, ohne bestehende Produktionslinien zu verändern. Im Vergleich zu pneumatischen Lösungen reduziert die EPG-ST Serie den Druckluftverbrauch, vereinfacht Installation und Bedienung und bietet eine höhere Kontrolle und Zuverlässigkeit. Bewährt in Anwendungen wie der Montage von 3C-Elektronik, der Handhabung von Batterien für neue Energien und in Life-Science-Laboren bietet die EPG-ST Serie eine effiziente, benutzerfreundliche Lösung, um den Übergang von pneumatischer zu elektrischer Automatisierung zu beschleunigen.Details
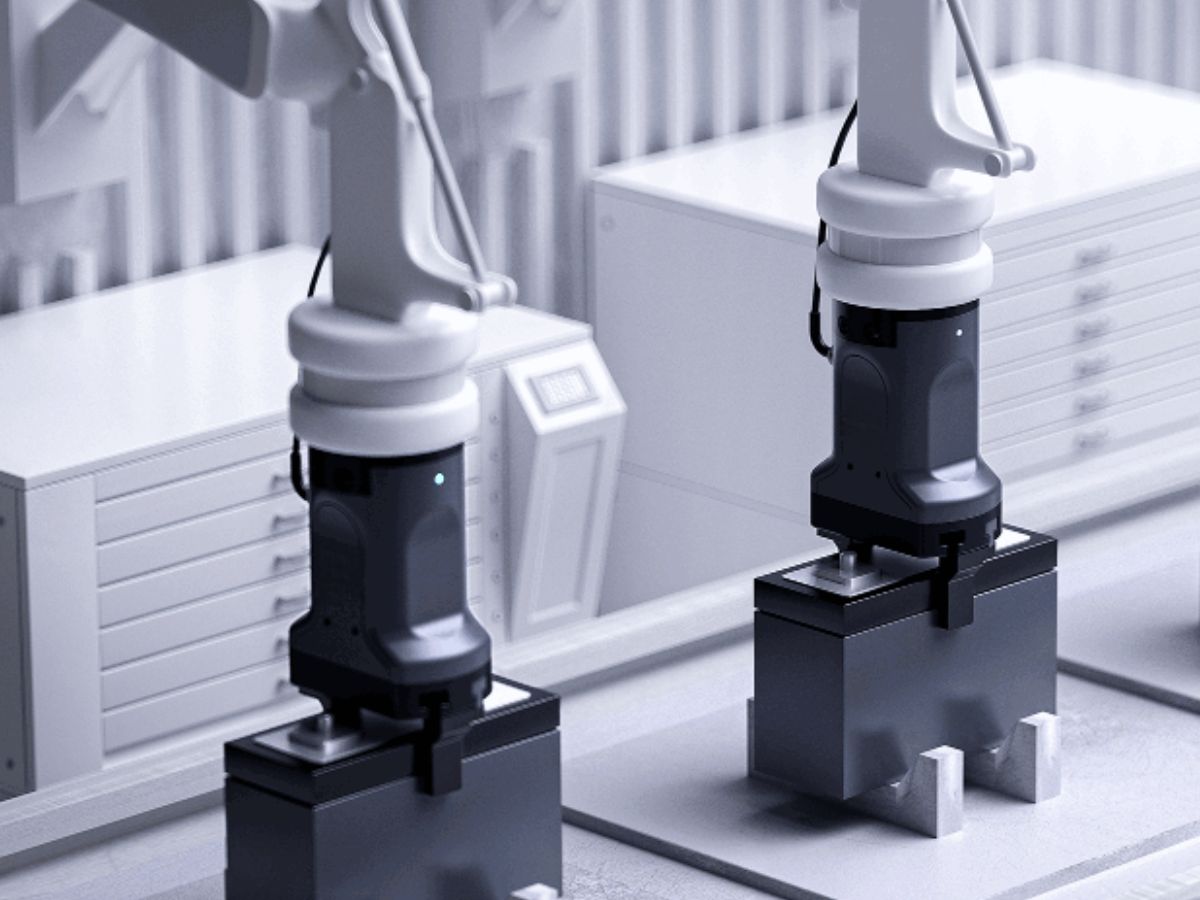
Elektrischer Parallelgreifer für die industrielle Automatisierung ersetzt pneumatische Greifer problemlosDie elektrischen Parallelgreifer der HONPINE EPG-ST Serie sind als kosteneffizienter Ersatz für herkömmliche pneumatische Greifer in Pick-and-Place- und Materialhandhabungsanwendungen konzipiert. Mit integriertem Motor, Treiber und Steuerung ermöglichen sie den direkten Ersatz pneumatischer Greifer derselben Größe, ohne bestehende Produktionslinien zu verändern. Im Vergleich zu pneumatischen Lösungen reduziert die EPG-ST Serie den Druckluftverbrauch, vereinfacht Installation und Bedienung und bietet eine höhere Kontrolle und Zuverlässigkeit. Bewährt in Anwendungen wie der Montage von 3C-Elektronik, der Handhabung von Batterien für neue Energien und in Life-Science-Laboren bietet die EPG-ST Serie eine effiziente, benutzerfreundliche Lösung, um den Übergang von pneumatischer zu elektrischer Automatisierung zu beschleunigen.Details Hochpräziser ZR Linear-Dreh-RotationsaktuatorDer Linear-Drehaktuator (auch als ZR-Aktuator bezeichnet) ist ein hochintegriertes zweidimensionales Bewegungsmodul, das lineare Hubbewegung (Z-axis) und 360°-Drehfunktion (R-axis) kombiniert. Er verwendet einen Linearmotor für präzise lineare Bewegung und einen Servomotor für die Drehbewegung. Durch die Kombination der beiden Achsen kann er synchronisierte Verbundbewegungen wie Heben, Drehen und Winkelkalibrierung ausführen. Er ist ideal für hochpräzise Anwendungen wie die Platzierung von Halbleiterchips und die Präzisionsmontage.Details
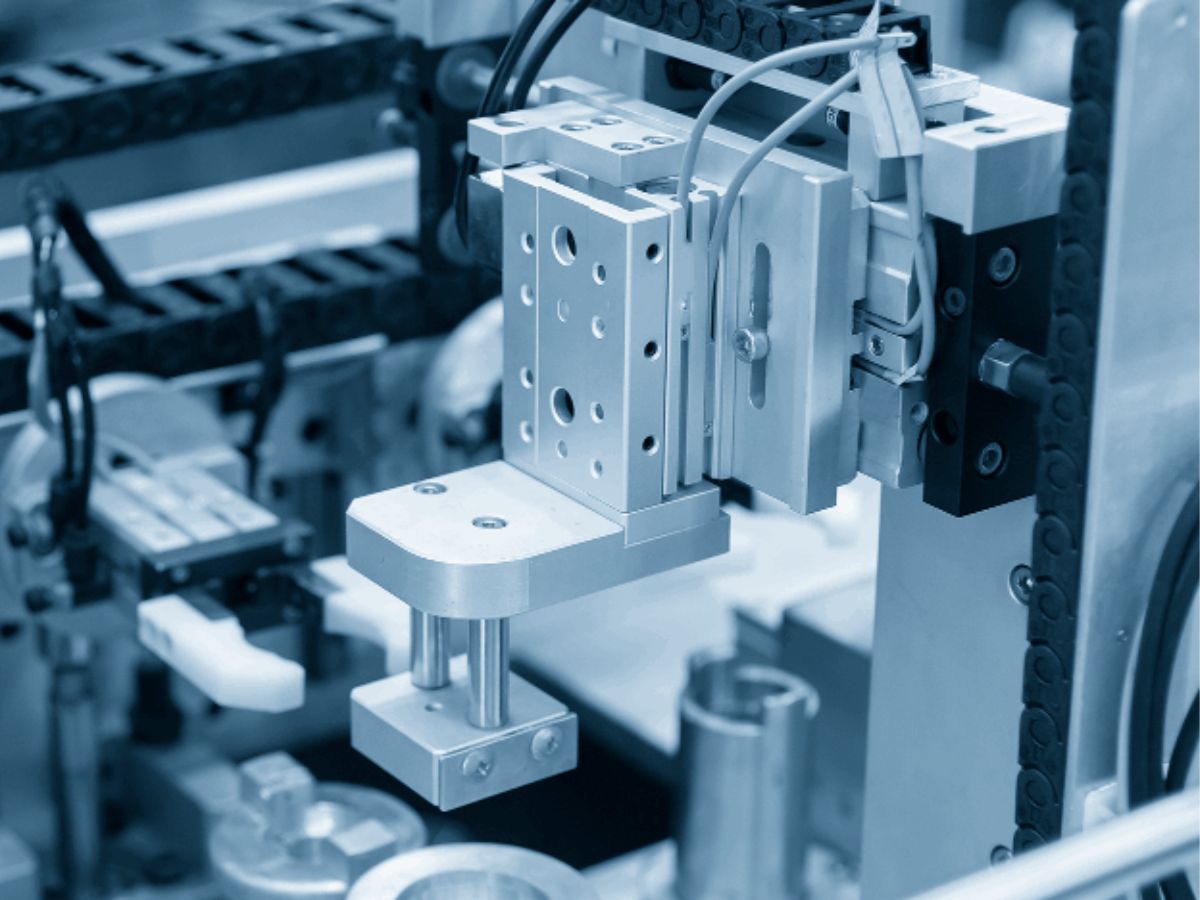
Hochpräziser ZR Linear-Dreh-RotationsaktuatorDer Linear-Drehaktuator (auch als ZR-Aktuator bezeichnet) ist ein hochintegriertes zweidimensionales Bewegungsmodul, das lineare Hubbewegung (Z-axis) und 360°-Drehfunktion (R-axis) kombiniert. Er verwendet einen Linearmotor für präzise lineare Bewegung und einen Servomotor für die Drehbewegung. Durch die Kombination der beiden Achsen kann er synchronisierte Verbundbewegungen wie Heben, Drehen und Winkelkalibrierung ausführen. Er ist ideal für hochpräzise Anwendungen wie die Platzierung von Halbleiterchips und die Präzisionsmontage.Details Industrieller intelligenter Servo-Elektrogreifer für RoboterDer elektrische Robotergreifer ist ein intelligenter Endeffektor, der von einem Servomotor angetrieben wird, für industrielle Automatisierungsszenarien entwickelt ist und am Ende des Roboters präzises Greifen, Handhaben und Montieren von Materialien ermöglicht. Sein Kern besteht aus einem Motor, einem Untersetzungsmechanismus, einem Sensor und einem Steuerungssystem und unterstützt adaptives Greifen mit Präzision im Millimeter- bis Mikrometerbereich und eignet sich für die flexible Produktion von Mikro-Werkstücken wie elektronischen Bauteilen, medizinischen Geräten und Präzisionsteilen.Details
Industrieller intelligenter Servo-Elektrogreifer für RoboterDer elektrische Robotergreifer ist ein intelligenter Endeffektor, der von einem Servomotor angetrieben wird, für industrielle Automatisierungsszenarien entwickelt ist und am Ende des Roboters präzises Greifen, Handhaben und Montieren von Materialien ermöglicht. Sein Kern besteht aus einem Motor, einem Untersetzungsmechanismus, einem Sensor und einem Steuerungssystem und unterstützt adaptives Greifen mit Präzision im Millimeter- bis Mikrometerbereich und eignet sich für die flexible Produktion von Mikro-Werkstücken wie elektronischen Bauteilen, medizinischen Geräten und Präzisionsteilen.Details 360°Präzisionsgesteuerter elektrischer Drehgreifer-EndeffektorDer elektrische Drehgreifer ist ein mechatronischer Endeffektor, der Greif- und Drehfunktionen kombiniert. Er treibt das Zahnrad- oder Synchronriemenmechanismus über den eingebauten Servomotor an, um während des Werkstückgreifprozesses eine synchrone Drehung zu erreichen (z. B. beim Verschrauben von Flaschenverschlüssen und bei der Montage von Zahnrädern). Sein Kern besteht aus einem Motor, einem Untersetzungsgetriebe, einem Greifmechanismus und einem Regler. Er unterstützt eine 360°-Drehung ohne tote Winkel sowie eine präzise Steuerung des Drehwinkels und eignet sich für Szenarien wie automatisierte Montagelinien und den Betrieb von Laborinstrumenten.Details
360°Präzisionsgesteuerter elektrischer Drehgreifer-EndeffektorDer elektrische Drehgreifer ist ein mechatronischer Endeffektor, der Greif- und Drehfunktionen kombiniert. Er treibt das Zahnrad- oder Synchronriemenmechanismus über den eingebauten Servomotor an, um während des Werkstückgreifprozesses eine synchrone Drehung zu erreichen (z. B. beim Verschrauben von Flaschenverschlüssen und bei der Montage von Zahnrädern). Sein Kern besteht aus einem Motor, einem Untersetzungsgetriebe, einem Greifmechanismus und einem Regler. Er unterstützt eine 360°-Drehung ohne tote Winkel sowie eine präzise Steuerung des Drehwinkels und eignet sich für Szenarien wie automatisierte Montagelinien und den Betrieb von Laborinstrumenten.Details Schneller, stabiler elektrischer Parallelgreifer für RoboterDer elektrische Parallelgreifer ist ein innovativer Roboter-Endeffektor, der durch präzisen Motorantrieb und Übertragungsmechanismus ein schnelles und stabiles Greifen von Objekten ermöglicht. Seine Greiffinger bewegen sich parallel auf einer Ebene, mit einem maximal einstellbaren Hub von 0-180mm und einer Einzelfinger-Greifkraft von 2N~800N. Er nutzt fortschrittliche Motortechnologie und Algorithmen der künstlichen Intelligenz, um die Greifmethode in verschiedenen komplexen Umgebungen automatisch anzupassen und sich an unterschiedliche Objektformen, -größen und -positionen anzupassen. Dieses Gerät benötigt keine externe Luftquelle, hat eine kompakte Struktur, unterstützt mehrere Installationsmethoden und eignet sich für den Einsatz auf engem Raum.Details
Schneller, stabiler elektrischer Parallelgreifer für RoboterDer elektrische Parallelgreifer ist ein innovativer Roboter-Endeffektor, der durch präzisen Motorantrieb und Übertragungsmechanismus ein schnelles und stabiles Greifen von Objekten ermöglicht. Seine Greiffinger bewegen sich parallel auf einer Ebene, mit einem maximal einstellbaren Hub von 0-180mm und einer Einzelfinger-Greifkraft von 2N~800N. Er nutzt fortschrittliche Motortechnologie und Algorithmen der künstlichen Intelligenz, um die Greifmethode in verschiedenen komplexen Umgebungen automatisch anzupassen und sich an unterschiedliche Objektformen, -größen und -positionen anzupassen. Dieses Gerät benötigt keine externe Luftquelle, hat eine kompakte Struktur, unterstützt mehrere Installationsmethoden und eignet sich für den Einsatz auf engem Raum.Details







Mikro-Elektrozylinder

Elektrischer Vakuum-Saugnapf
 Elektrischer Vakuumaktuator der EVS-Serie für die Palettierung in der industriellen AutomatisierungDer elektrische Vakuumaktuator der HONPINE EVS-Serie ist eine kompakte und energieeffiziente EOAT-Lösung für die industrielle Automatisierung, etwa für Pick-and-Place, Palettieren und Materialhandhabung.
Elektrischer Vakuumaktuator der EVS-Serie für die Palettierung in der industriellen AutomatisierungDer elektrische Vakuumaktuator der HONPINE EVS-Serie ist eine kompakte und energieeffiziente EOAT-Lösung für die industrielle Automatisierung, etwa für Pick-and-Place, Palettieren und Materialhandhabung.
Mit einem Gewicht von nur 2.5 kg und einer Nutzlastkapazität von bis zu 10 kg bietet er starke Leistung in einer leichten Konstruktion. Durch den Betrieb mit einem 24 V-Niederspannungssystem reduziert er den Energieverbrauch auf etwa 20% herkömmlicher pneumatischer Systeme und trägt so zur Senkung der Betriebskosten bei.
Der EVS bietet eine einstellbare Saugkraft von 102 N bis 510 N für unterschiedliche Werkstücke. Sein kompaktes Design ist 30% kleiner als pneumatische Lösungen und eignet sich damit für Roboteranwendungen mit begrenztem Bauraum.
Mit direkter Robotermontage, Echtzeit-Vakuumrückmeldung und intelligenten Überwachungsfunktionen gewährleistet der EVS einen stabilen, effizienten und zuverlässigen Betrieb in automatisierten Produktionslinien.Details Elektrischer Vakuumsauger für RoboterDer elektrische Vakuumsauger für Roboter ist ein elektrisch angetriebener Endeffektor, der auf dem Prinzip der Vakuumadsorption basiert. Er verwendet eine eingebaute Vakuumpumpe, um Unterdruck zum Greifen von Objekten zu erzeugen, und ersetzt damit herkömmliche manuelle Handhabungsmethoden effektiv. Das Kerndesign integriert ein intelligentes Steuerungssystem und eine mehrschichtige Dichtstruktur, wodurch er sich für die Handhabung glatter oder leicht rauer Oberflächen wie Fliesen, Steinplatten und Glas eignet.Details
Elektrischer Vakuumsauger für RoboterDer elektrische Vakuumsauger für Roboter ist ein elektrisch angetriebener Endeffektor, der auf dem Prinzip der Vakuumadsorption basiert. Er verwendet eine eingebaute Vakuumpumpe, um Unterdruck zum Greifen von Objekten zu erzeugen, und ersetzt damit herkömmliche manuelle Handhabungsmethoden effektiv. Das Kerndesign integriert ein intelligentes Steuerungssystem und eine mehrschichtige Dichtstruktur, wodurch er sich für die Handhabung glatter oder leicht rauer Oberflächen wie Fliesen, Steinplatten und Glas eignet.Details


Dexteröse Roboterhand- FAQ
1. Geschickte Hände
Geschickte Hände sind Endeffektoren mit hohem Freiheitsgrad, die menschliche Hände nachahmen und humanoiden Robotern das Greifen, Drehen, Rotieren und andere komplexe Aufgaben ermöglichen.
2. Endeffektoren vom Klemmtyp
Diese verwenden mechanische Greifer, um Objekte sicher zu halten, und werden häufig in der industriellen Automatisierung eingesetzt.
3. Endeffektoren vom Vakuum-/Saugtyp
Diese verwenden Vakuumsaugung für das Handling von flachen oder leichten Gegenständen wie Glas, Verpackungen und Elektronik.
4. Spezialisierte Endeffektoren
Maßgeschneiderte Werkzeuge für spezifische Aufgaben wie Schweißen, Lackieren, Polieren oder Chirurgie.
A. Traglastkapazität
Umfasst das Gewicht sowohl des Endeffektors als auch des gehandhabten Objekts. Das durch den Schwerpunkt des Objekts verursachte Drehmoment muss innerhalb der Belastungsgrenze des Roboterhandgelenks bleiben.
B. Freiheitsgrade (DOF)
Einfache Greifer haben in der Regel einen DOF (öffnen/schließen), während komplexe Aufgaben mehrere DOFs erfordern können, was die Flexibilität, aber auch die Kosten und die Komplexität der Steuerung erhöht.
C. Präzision und Wiederholgenauigkeit
Hochpräzise Aufgaben erfordern eine Wiederholgenauigkeit im Mikrometerbereich. Elektrische Greifer bieten in der Regel eine bessere Positionskontrolle als pneumatische.
D. Anpassungsfähigkeit an die Umgebung
Für extreme Temperaturen, Reinräume oder explosionsgeschützte Industrieumgebungen können spezielle Ausführungen erforderlich sein.
E. Werkzeugwechselsysteme
Automatische Werkzeugwechsler ermöglichen es Robotern, Aufgaben schnell durch zuverlässige mechanische, elektrische und pneumatische/hydraulische Verbindungen zu wechseln.
Passive Freiheitsgrade (DoF):
Diese Freiheitsgrade werden nicht direkt durch Motoren angetrieben. Stattdessen wird die Bewegung über mechanische Elemente wie Zahnräder, Sehnen oder Gestänge übertragen, wodurch eine adaptive Bewegung ermöglicht wird, die durch äußere Kräfte oder gekoppelte Gelenke angetrieben wird.
Aktive Freiheitsgrade (DoF):
Diese Freiheitsgrade werden direkt und automatisch durch Motoren gesteuert, was eine präzise, programmierbare Bewegungs- und Kraftregelung ermöglicht.
Die Hand selbst integriert keinen eingebauten Vision-Sensor. However, ein externes Vision-Modul kann hinzugefügt werden, um visuelle Wahrnehmung zu ermöglichen.
Für die taktile Wahrnehmung sind kapazitive oder piezoresistive (resistive) Sensorpads erforderlich, um Kontakt, Druck und Interaktionskräfte zu erkennen.
Damit humanoide Roboter Menschen bei Aufgaben wie Greifen, Tragen, Montage, Drehen und Handhabung wirklich ersetzen können, müssen diese Handlungen letztlich durch die „Hände“ ausgeführt werden.
Als Endeffektor des Roboters dient die geschickte Hand als direkte physische Schnittstelle zwischen dem Roboter und der Außenwelt. Ihre Leistung bestimmt grundlegend die Grenzen der praktischen Fähigkeiten des Roboters.
Ohne geschickte Hände können humanoide Roboter möglicherweise „sehen“ und „gehen,“ aber sie können nicht wirklich „handeln.“
Deshalb hat Elon Musk die geschickte Hand als eine der schwierigsten technischen Herausforderungen bei der Entwicklung von Optimus bezeichnet.
Die Spezifikationen der piezoresistiven und kapazitiven Sensoren werden entsprechend Ihrer spezifischen Produktkonfiguration und Ihren Auswahlanforderungen bereitgestellt.
Ja, wir bieten Teleoperationshandschuhe an, und ihre Preise sind wettbewerbsfähiger als die der meisten Alternativen auf dem Markt.
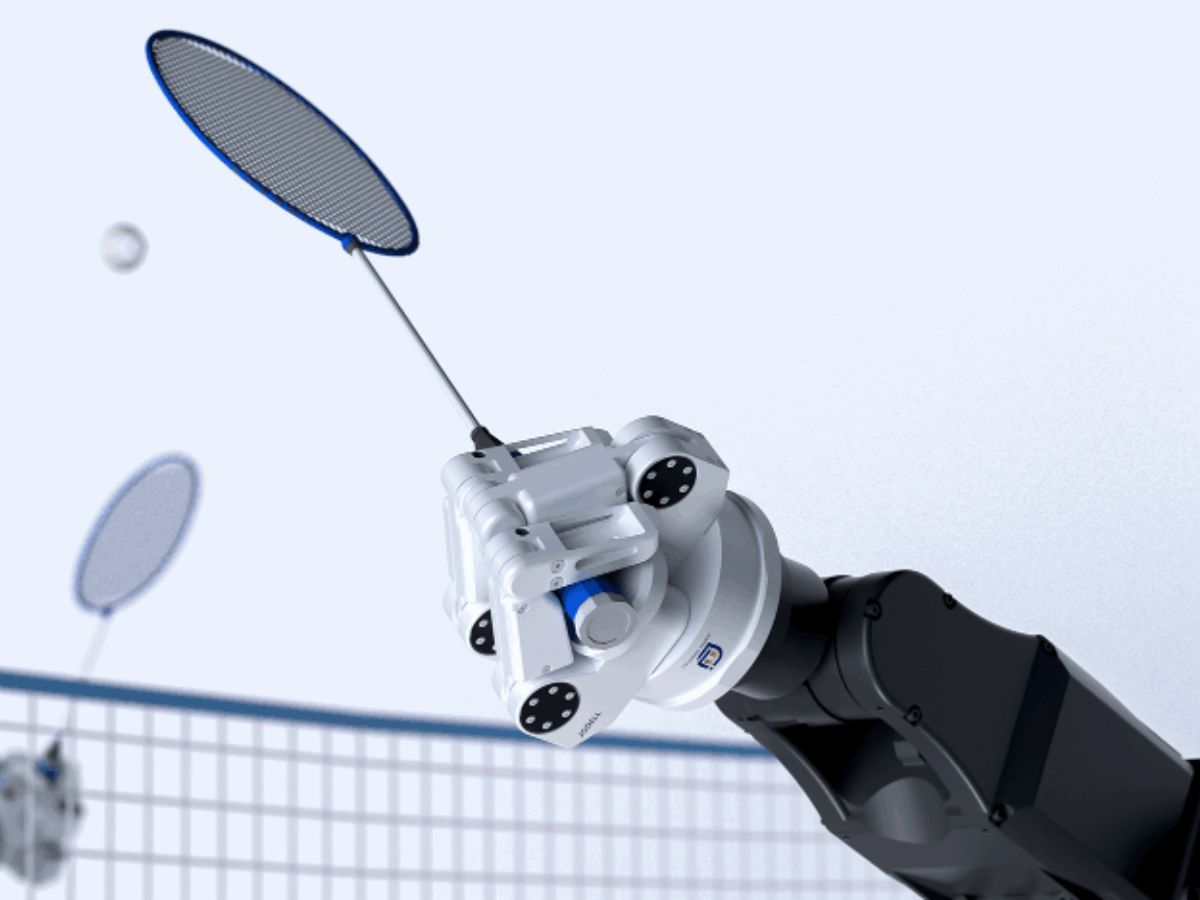
Die modulare humanoide geschickte Hand der neuen Generation, Linker Hand L30, verfügt über 22 Freiheitsgrade in der gesamten Hand und integriert biomimetische Prinzipien tiefgreifend mit fortschrittlichen mechatronischen Technologien.
Während sie ein hochgradig anthropomorphes Design erreicht, verfügt sie auch über hochpräzise Steuerung und Echtzeit-Sensorik. Die Geschwindigkeiten der Kerngelenke überschreiten 400°/s, und das vollständige Öffnen oder Schließen der gesamten Hand kann in nur 0.2 Sekunden abgeschlossen werden.
Ihre Hochgeschwindigkeitsbewegungsleistung und präzise Manipulation haben das Publikum bei Live-Demonstrationen beeindruckt.
HONPINEs dexterous hand erreicht ein optimales Gleichgewicht zwischen Leistung und Kosten durch selbst entwickelte kostengünstige Antriebsmodule in Kombination mit Open-Source-Algorithmus-Frameworks.
Dies wird zusätzlich durch Chinas gut etabliertes Lieferketten-Ökosystem unterstützt. Darüber hinaus liefern umfangreiche Anwendungen in industriellen und medizinischen Szenarien reichlich reale Daten für eine schnelle technologische Iteration. Zusammen bilden diese Faktoren die zentrale Grundlage für den Aufbau einer weltweit wettbewerbsfähigen „technologischen Lösung auf Basis Chinas.“
Durch die Nutzung einer biomimetischen sehnengetriebenen Struktur, hochpräziser Drehmomentregelung und schneller dynamischer Reaktion zeigen die HONPINE dexterous hands außergewöhnliche Fähigkeiten zur feinfühligen Manipulation.
Sie demonstrieren umfassend die technischen Vorteile der Koordination mehrerer Freiheitsgrade und der kraftgeregelten Wahrnehmung und ermöglichen präzise, stabile und geschickte Roboterhandoperationen.
In der Robotik ist ein Endeffektor das Werkzeug, das am Ende eines Roboterarms befestigt ist und mit der externen Umgebung interagiert. Auch als End-of-Arm Tooling (EOAT) bekannt, wird er durch ISO-Standards als eine Vorrichtung definiert, die über einen Flansch mit dem Roboterarm zur Aufgabenausführung verbunden ist, und wird nicht als Teil des Roboterarms selbst betrachtet.
In der Roboterkinematik ist der Endeffektor im Wesentlichen die „Hand“ des Roboters. Das daran befestigte Koordinatensystem wird als Werkzeugkoordinatensystem bezeichnet, dessen Ursprung typischerweise als Tool Center Point (TCP) definiert ist. Benutzer können den TCP auch für spezifische Aufgaben anpassen, zum Beispiel indem sie die Spitze einer Schweißdüse beim Roboterschweißen als TCP festlegen.
Zu den gängigen Endeffektoren gehören Greifer, Werkzeugwechsler, Schweißzangen, Saugnäpfe und Spritzpistolen. Sensoren können ebenfalls integriert werden, um die Aufgabenleistung und Präzision zu verbessern.
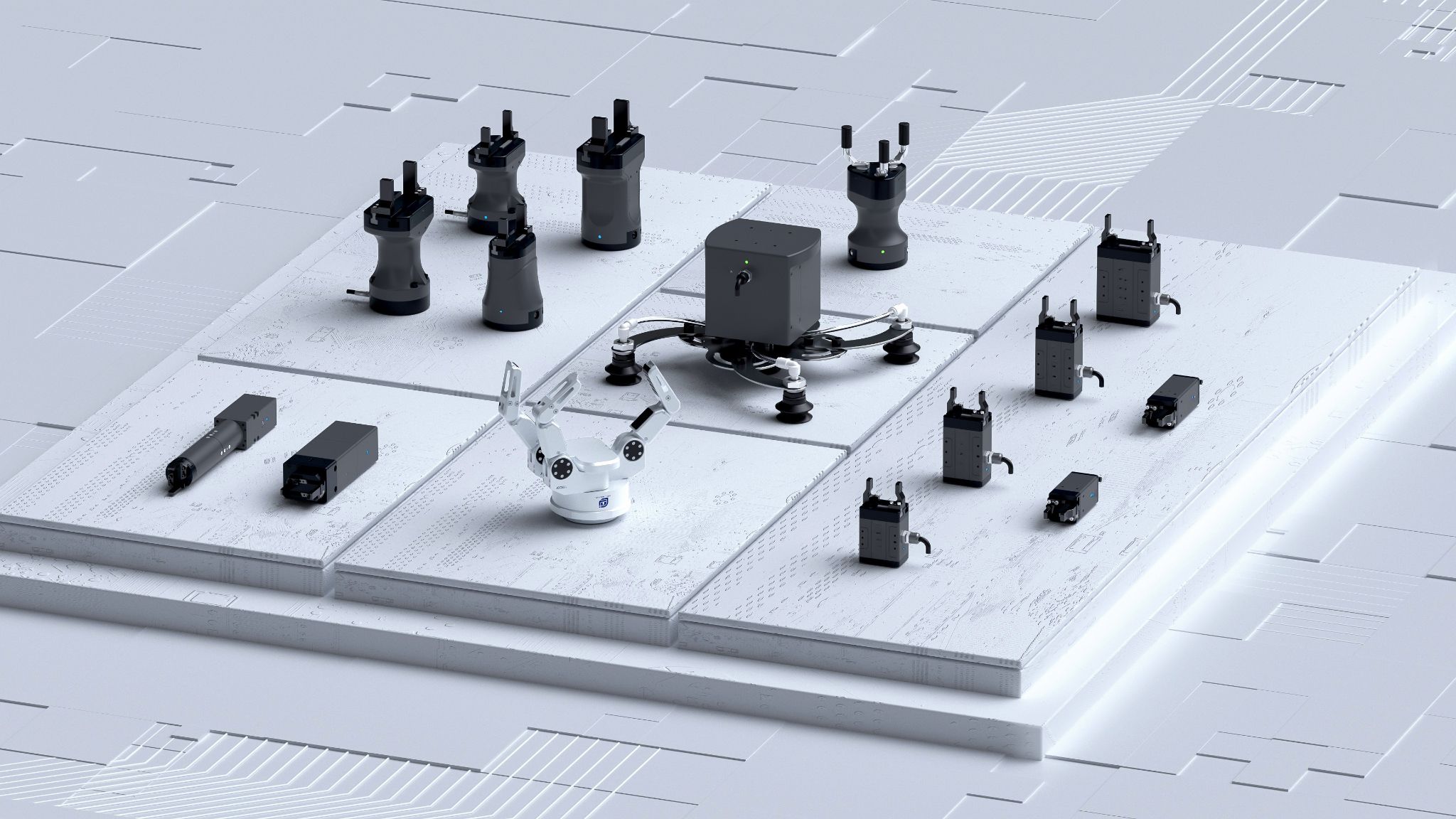
Anwendung des Roboter-Endeffektors
Der Roboter-Endeffektor bietet neun Serien, darunter industrielle dexteröse Hände, intelligente elektrische Greifer, elektrischeSaugnäpfe und multifunktionale Modelle für die medizinische Automatisierung, Lithiumbatterie-, 3C-, Halbleiter- undLebensmittelindustrie. Unsere Aktuatoren sind kompakt konstruiert und gewährleisten hohe Präzision, hohe Steifigkeit und ultralangen Hub mit
präziser Kraftregelung. Sie unterstützen Netzwerkanwendungen, sind einfach zu installieren und leicht zu bedienen—und bietensichere, effiziente Automatisierungslösungen für vielfältige Produktionsanforderungen.
‹

›

- 00
0000-00
So wählen Sie Roboter-Gelenkmodule für Arme, Rumpf, Kopf und Beine in AGV- und humanoiden Robotern aus
- 00
0000-00
Was ist ein Robotergelenk-Aktuator?Wie wählt man den besten rotierenden Robotergelenk-Aktuator aus?
- 00
0000-00
DD-Motoren VS harmonische Drehaktuatoren
- 00
0000-00
Warum sind harmonische Gelenkaktuatoren bzw. planetarische Gelenkaktuatoren die ideale Wahl für die oberen und unteren Gliedmaßen humanoider Roboter?
- 00
0000-00
Unterschiede zwischen Planetengetrieben mit Stirnrädern und Planetengetrieben mit Schrägverzahnung





